In modern production lines, the use of robots has become more and more widespread. For example, a large domestic enterprise has thousands of different types of boxes to load different types of products at the production site. However, the weight of each box is very different, the heaviest Nearly 30KG, the era of still relying on human handling is obviously gone. With the gradual improvement of automation, the application of robots has been incorporated into the modern production process. Therefore, this large enterprise envisages replacing these hard laborers with robots. At the same time, the German Begela Cartesian robot represented by Shenyang Rhein Mechanical & Electrical Co., Ltd. solved this problem for this company through the experience of Begela Robot for many years. This is Begela's Palletizing Robot.
The so-called palletizing robot is mainly composed of several linear motion axes, usually corresponding to the X axis, Y axis and Z axis in the Cartesian coordinate system. In most cases, the angle between each linear motion axis of a Cartesian coordinate robot is a right angle. Usually, the X axis and the Y axis are the axis of motion in the horizontal plane, and the Z axis is the axis of up and down motion. The core component of the Cartesian coordinate robot is the linear motion axis, which is composed of refined aluminum profiles, toothed belts, linear motion guides and servo motors. The standard maximum stroke of a single motion axis is 5600mm, the load is 1~200kg, the positioning accuracy is 0.05mm, and the maximum motion speed is 8m/s. According to the specific application, the corresponding guide rails are selected for positioning accuracy, effective stroke, running speed and load size, movement mode, etc., and combined into a corresponding form of multi-dimensional robot to complete specific tasks. According to its structure, there are more than 30 two-dimensional and three-dimensional robots, and one or two rotating axes can be added to the Z axis to form four-dimensional and five-dimensional robots.
Multiple Cartesian robots are constructed according to a specific combination and complete specific tasks simultaneously. Palletizing robots are the most common combination, forming a variety of standard forms of palletizing robots for different applications. Let's take the case stacking of this large state-owned enterprise as an example for a brief description according to the above.
One: Project Introduction1) The degree of freedom of the handling robot: gantry type, including X-axis, Y-axis, and Z-axis 3 degrees of freedom, of which the X-axis has a follow-up axis without transmission parts;
2) Movement stroke of the handling robot: X axis: within 2400mm, Y axis: within 1300mm, Z axis: within 1300mm, 3-axis linkage;
3) The maximum load of the end of the handling robot: 30KG (excluding grippers);
4) Repetitive positioning accuracy of the handling robot: The repetitive positioning accuracy of the 3-axis motion is not greater than 0.1mm with a dial indicator for acceptance;
5) Drive and positioning mode: AC servo drive, servo positioning;
6) When running at a speed of 12 meters per minute, it is stable, acceleration and deceleration are smooth, and there is no obvious vibration;
7) The claw opens and closes steadily, has enough gripping power, can hold the box firmly, and ensure that there will be no slipping during the handling process;
8) The handling robot can meet the production cycle, that is, every unit time (within 1 minute) grabs a full box from the conveyor belt and transports it to the designated beat; continuously transports the full box and stacks it on the beat regularly;
9) The system is stable and reliable, and the programming is simple.
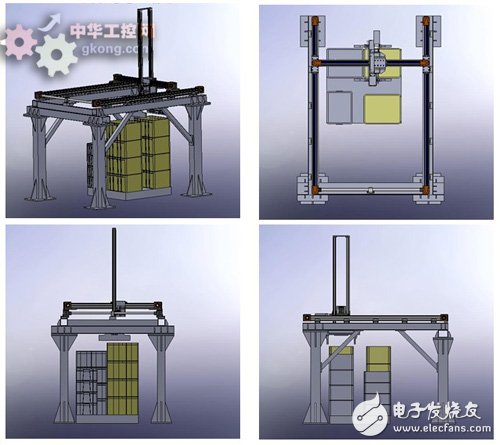
As shown in the figure above, we arrange the three different types of boxes into a reasonable order, put them on the conveyor belt and upload them to the hands of Baigela 3D robot directly under the claws. The 3D robot moves through the 3D space according to the pre-programmed program. Placing the box on the designated racket, through this robot, the production workers are freed from the heavy labor to do more work, which greatly improves the production efficiency. Below we will describe the specific working process of the robot in detail:
1) Conveyor belt positioning: After different types of boxes are placed on the conveyor belt, the conveyor belt driven by the servo motor will move to the robot working area at a very fast speed, and the boxes will be positioned through the preliminary positioning device;
2) Manipulator grabbing: The manipulator is driven by a 6NM stepper motor, and the holding force can reach 1000N, which is far beyond the power required by the box. The grippers at both ends of the manipulator are equipped with three common grooves for the box, which can meet the needs of the site at the same time. No need to change the gripper;
3) Robot movement process: After the manipulator grabs the box, it gives a signal to the robot motion control system. The robot performs three-dimensional motion according to the pre-edited program. The specific motion process can be determined according to the actual situation. There are three different weights of boxes. Follow the three program trajectories to move, and finally will be placed on the designated beat in a reasonable and orderly manner;
4) Transport of the racket: After the robot places the box on the racket according to the specified procedure, the racket will be moved to the finished product placement area through the transport cart.
The German Biogla company is one of the most famous robot suppliers in the world. It produces various specifications of linear motion units, precision motion platforms, stepper motors, AC servo motors, linear motors, and many other types of toothed belt drive and lead screw drive. Axis CNC system. Tens of thousands of linear motion units, two-dimensional and three-dimensional standard robots and user-specific robots produced in the past 20 years are running on production lines all over the world. Perform a series of work such as welding, handling, loading and unloading, packaging, palletizing, destacking, testing, flaw detection, classification, assembly, labeling, coding, gluing and cutting. All parts of the robot system, drive motors and control systems are all produced by Baigla Company, which makes the overall performance of the robot even better. By replacing and adjusting some linear motion units and combinations, changing CNC software and other methods to adapt to newer and higher requirements. Well received by packaging machinery, printing machinery, automobile industry, food production industry, pharmaceutical production industry, electronics industry, machine manufacturing and cosmetics production industries.
Baigra robot system integrates headstock, tailstock, guide rail, toothed belt or lead screw, motor and reducer. The use of built-in guide rails and optional protective steel belts provides good dust-proof effect, small size and light weight, and a very beautiful appearance, which reduces the quality of customers' products as a whole, but ensures high impact resistance and smooth operation. Hundreds of robots with two-dimensional to five-dimensional structures basically meet the motion requirements of various three-dimensional spaces, giving customers more choices.
Shenyang Baige introduced Baigra robots to the Chinese market in 1996 and successfully served various industries. We have cultivated our own robotics experts in the friendly cooperation with Baigera; Shenyang Baige Robotics is actively working to enhance the competitiveness of Chinese enterprises with the most suitable products, the most exquisite technology and the most thoughtful service!
Dongguan Tuojun Electronic Technology Co., Ltd , https://www.fibercablessupplier.com