At first glance, gyroscope , such a tall thing is generally not known, but I believe that most people should have heard of the top, as shown below, people who have seen "Pirates of the Space" must be impressed by this gyro, in fact Their principles are similar, but what is the gyroscope ? Let me briefly introduce you to everyone.

1. Gyro principle: Gyro is God Dongdong?
The gyroscope is a device used to sense and maintain the direction, based on the theory of angular momentum immortality. The gyroscope is mainly composed of a wheel that can be rotated at the axis. Once the gyroscope begins to rotate, the gyroscope has a tendency to resist the change of direction due to the angular momentum of the wheel. Gyros are mostly used in navigation, positioning and other systems.

In 1850, the French physicist J. Foucault first discovered the rotor in high-speed rotation in order to study the rotation of the earth. Due to inertia, its axis of rotation always points in a fixed direction. He uses the Greek word gyro (rotation). ) and skopein (see) the word gyro scopei to name this instrument.
Unexpectedly, the chicken head is a very perfect gyroscope. No matter how you move the chicken body, it can always hold your head, too powerful!

Since the chicken head is a gyroscope, the foreigner adds a camera, and the picture is even more unimaginable.
2. Gyro principle : basic composition and classification of gyroscope
2.1 The basic composition of the gyroscope
The gyroscope device has always been the most convenient and practical reference instrument for aeronautical and marine navigational attitudes and rates. When analyzing the motion of the gyro from a mechanical point of view, it can be regarded as a rigid body. There is a universal fulcrum on the rigid body, and the gyro can rotate three degrees of freedom around the fulcrum, so the movement of the gyro belongs to The rigid body rotates around a fixed point. More specifically, a flywheel rotor that rotates at high speed around the axis of symmetry is called a gyro. The gyroscope is mounted on the frame device to make the rotation axis of the gyroscope have the degree of angular rotation. The overall device of the device is called a gyroscope. The basic components of the gyroscope are:
(1) Gyro rotor (usually using synchronous motor , hysteresis motor, three-phase AC motor and other drag methods to make the gyro rotor rotate around the rotation axis at high speed, and see its speed is approximately constant):
(2) Inner and outer frames (or inner and outer rings, which are structures for obtaining the desired angular rotational freedom of the gyro's rotation axis);
(3) Accessories (referring to torque motors, signal sensors, etc.).

2.2 Classification of gyroscopes
According to the degree of freedom of rotation of the rotor, it is divided into a two-degree-of-freedom gyroscope (also called a three-degree-of-freedom gyroscope) and a single-degree-of-freedom gyroscope (also called a two-degree-of-freedom gyroscope). The former is used to determine the attitude angle of the aircraft, and the latter is used to determine the angular velocity of the attitude. Therefore, it is often called a single-degree-of-freedom gyroscope. However, it is usually classified according to the support method used in the gyroscope.
Ball Bearing Free Gyro It is a classic gyroscope. The use of ball bearing support is the earliest and most widely used support method. The ball bearing is directly contacted, the friction torque is large, the accuracy of the gyroscope is not high, and the drift rate is several degrees per hour, but the work is reliable, and it has been used in occasions where the precision is not high. A free-rotor gyroscope (dual-degree-of-freedom gyroscope) measures two attitude angles by means of an inner ring shaft and an outer ring shaft angle sensing element.

The liquid floating gyro is also called the float gyro. The inner frame (inner ring) and the rotor form a sealed spherical or cylindrical float assembly. The rotor rotates at high speed within the float assembly, and floats between the float assembly and the housing to create the required buoyancy and damping. The buoyancy is equal to the weight of the float assembly, called the full float gyro; the float force is less than the weight of the float assembly is called the semi-floating gyro. Due to the buoyancy support, the friction torque is reduced, and the accuracy of the gyroscope is high, but there is still friction due to the inability to locate. To compensate for this deficiency, magnetic levitation is usually added on the basis of liquid floating, that is, the weight of the float assembly is assumed by the floating liquid, and the thrust formed by the magnetic field suspends the float assembly at the center position. In addition, the rotor can be supported by a dynamic pressure film formed between the rotor rotating at a high speed and the inner frame, which is called a dynamic pressure air bearing. The modern high-precision single-degree-of-freedom liquid-floating gyro is often a three-floating gyroscope used for liquid floating, magnetic floating and dynamic pressure air floating. This kind of gyroscope has higher precision than the ball bearing gyroscope, and the drift rate is 0.01 degrees/hour. However, the liquid floating gyro requires high processing precision, strict assembly, and precise temperature control, so the cost is high.

Electrostatic gyroscopes are also known as electro-floating gyros. A uniformly distributed high-voltage electrode is arranged around the metal spherical hollow rotor to form an electrostatic field to the rotor, and the high-speed rotating rotor is supported by electrostatic force. This method belongs to the spherical support, and the rotor can rotate not only around the rotation axis but also in any direction perpendicular to the rotation axis, so it is a free rotor gyroscope type. The electrostatic field has only suction, and the closer the rotor is to the electrode, the greater the suction force, which makes the rotor unstable. The rotor is held in a central position by varying the force applied to the rotor with a set of support circuits. The electrostatic gyroscope is non-contact and has no friction, so the accuracy is high and the drift rate is as low as 10 to 10 degrees per hour. It cannot withstand large shocks and vibrations. Its disadvantage is that the structure and manufacturing process are complicated and the cost is high.

A flexible gyroscope rotor mounted on a gyroscope on an elastic support device. A widely used flexible gyro is a power-tuned flexible gyroscope. It consists of an inner flexible rod, an outer flexible rod, a balance ring, a rotor, a drive shaft and a motor. It balances the elastic moment generated by the support of the flexible rod by the dynamic reaction torque (gyro moment) generated by the balance ring torsion movement, so that the rotor becomes an unconstrained free rotor. This balance is tuning. The flexible gyroscope is an inertial component that was rapidly developed in the 1960s. It is widely used in aircraft and missiles due to its simple structure, high precision (similar to liquid floating gyro) and low cost.

The structure of the laser gyro is completely different from the above several gyroscopes. A laser gyro is actually a ring-shaped laser that does not have a mechanical rotor that rotates at a high speed, but it uses laser technology to measure the angular velocity of an object relative to the inertial space, and has the function of a rate gyro. The structure and operation of the laser gyro is: a triangular cavity is made of a material having a very small coefficient of thermal expansion. Three mirrors are mounted at each vertex of the cavity to form a closed optical path. The chamber is evacuated, filled with helium, and equipped with electrodes to form a laser generator. The laser generator produces two beams that are directed at the opposite laser. When the ring laser is at rest, the two lasers have the same optical path around one turn, so the frequency is the same, the difference between the two frequencies (frequency difference) is zero, and the interference fringes are zero. When the ring laser rotates about an axis perpendicular to the plane of the closed optical path, the optical path of the beam in accordance with the direction of rotation is extended, the wavelength is increased, the frequency is decreased, and the other beam is opposite, so that a frequency difference occurs, and interference fringes are formed. The number of interference fringes per unit time is proportional to the angular velocity of rotation. The drift rate of the laser gyro is as low as 0.1 to 0.01 degrees/hour, the reliability is high, and it is not affected by the linear acceleration. It has been applied in the inertial navigation of the aircraft, and it is a promising new gyroscope.

The optical fiber gyroscope in the development process is gradually becoming a practical instrument. Other new principles of gyroscopes, such as nuclear resonance gyroscopes, are still in the research stage.
3. Gyro principle : gyroscope principle and characteristics
3.1 Gyro principle
The gyroscope is a device that maintains a relative tracking state in dynamics. Due to the complexity of its principle, we look at the principle of the gyroscope by means of a graph. 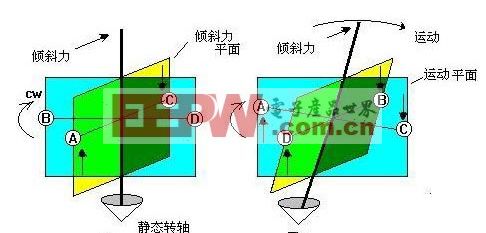
Figure 2 Figure 3
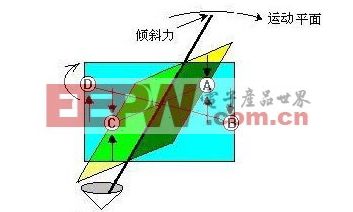
Figure 4
As shown, the bottom of the shaft is held stationary but can rotate in all directions. When a tilting force acts on the top axis, the mass point A moves upward and the mass point C moves downward, as shown in sub-picture 2. Since the gyroscope is rotated clockwise, the particle point A will reach the position of the mass point B after being rotated by a 90 degree angle. The same is true for the two dots of the CD. In the subgraph 2, the mass point A continues to move upward when it is at the 90 degree position of the figure, and the mass point C continues downward. The combination of AC mass points will cause the axis to move within the plane of motion shown in sub-figure 3. The axis of a gyroscope rotates at a suitable angle, in which case if the gyroscope rotates counterclockwise, the axis will move to the left on the plane of motion. If in the case of clockwise, the tilting force is a thrust rather than a pulling force, the motion will occur to the left. In sub-figure 4, when the gyroscope is rotated by another 90 degrees, the mass point C is at the position before the mass point A is stressed. The downward movement of the C mass point is now obstructed by the tilting force and the shaft cannot move in the plane of the tilting force. The greater the force of the tilting force pushing the shaft, the more the edge of the other side pushes the axial back motion when the edge is rotated by approximately 180 degrees. 
In fact, the shaft will rotate in the plane of the tilting force in this case. The reason why the axis rotates is because the energy of the particle AC moving up and down causes the shaft to move in the plane of motion. When the mass point AC is finally rotated to a substantially opposite position, the tilting force is greater than the upward and downward blocking motion.
3.2 Characteristics of the gyroscope
The gyroscope has two characteristics: 1 Fixed axis: The high-speed rotating rotor has the characteristic of maintaining the stability of the direction of rotation of the rotating shaft in the inertial space. The rotor angular momentum, that is, the vector H (Fig. 5 [precession phenomenon of the gyroscope]) is the product of the moment of inertia J of the rotor about the rotation axis and the angular velocity of the rotation (H = J). The fixed axis means that the vector [kg2]H[kg2] tries to keep the pointing invariant. 2 Precession: Under the action of external torque, the rotating rotor is forced to rotate its axis along the shortest path to the direction of the outward moment. In Fig. 3, the gyroscope rotor does not fall from the fulcrum under the action of gravity G, but continuously rotates around the vertical line at an angular velocity [kg2] ω [kg2], which is the precession. The precession angular velocity [kg2] ω = L / H, where L is the external moment, here refers to the moment generated by gravity. The precession angular velocity of the rotor caused by the disturbance torque is called the drift rate of the gyro, and the unit is degree/hour, which is the main indicator for measuring the performance of the gyroscope.
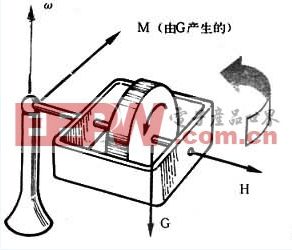
Figure 5 Gyro precession phenomenon
4. Gyro principle: application of gyroscope
Gyro instruments were first used for navigational navigation, but with the development of science and technology, it has also been widely used in aviation and aerospace. The use of gyroscopes is the closest to our mobile phones. The role of gyroscopes in mobile phones is mainly reflected in the following aspects:
The first big use, navigation. Since the invention of the gyroscope, it has been used for navigation. First, the Germans applied it to the V1 and V2 rockets. Therefore, if GPS is used, the navigation capability of the mobile phone will reach an unprecedented level. At present, many professional handheld GPS devices are also equipped with gyroscopes. If the corresponding software is installed on the mobile phone, the navigation capability is no less than that of many navigation devices used on ships and airplanes.

The second most useful use can be used with the camera on the mobile phone, such as anti-shake, which will greatly improve the camera's ability to take pictures.
The third largest use, sensors of various games, such as flying games, sports games, and even some first-view shooting games, the gyroscope completely monitors the displacement of the player's hand, thereby achieving various game operation effects. Regarding this, I think the brothers who have used Nintendo WII will have a deep feeling.

The fourth largest use can be used as an input device. The gyroscope is equivalent to a stereo mouse. This function is similar to the game sensor in the third largest application, and can even be considered as a type.
The fifth largest use is also the most promising and application range of the future. Let's focus on the following. That is the ability to help the phone achieve a lot of augmented reality. Augmented reality is a concept that has only recently emerged. Like virtual reality, it is an application of computers. The general idea is that people can have a deep understanding of some objects in reality through the processing power of mobile phones or computers. If you don't understand, for example, there is a building in front, with a mobile phone camera aimed at it, you can get the relevant parameters of the building on the screen, such as the height, width, altitude of the building, even if connected to the database, even You can get the owner of the building, the construction time, the current use, the number of people that can be accommodated, and so on.
Gyro Principles - References
1, gyroscope principle
Description: Summary analysis of the principle of gyroscope
2. Simple calibration of MEMS gyroscope
Description: Simple calibration of MEMS gyroscopes
3. Improve the accuracy and stability of MEMS gyroscopes through calibration
Description: A method to improve the accuracy and stability of MEMS gyroscopes
Thyristor
OVNS TIN Mesh Vape is so convenient, portable, and small volume, you just need to take them
out of your pocket and take a puff, feel the cloud of smoke, and the fragrance of fruit surrounding you. It's so great.
We are the distributor of the ovns & vapeak vape brand, we sell ovns disposable vape,ovns vape kit, ovns juul compatible refillable pod, and so on.
We are also China's leading manufacturer and supplier of Disposable Vapes puff bars, disposable vape kit, e-cigarette
vape pens, and e-cigarette kit, and we specialize in disposable vapes, e-cigarette vape pens, e-cigarette kits, etc.
ovns tin mesh vape bar,ovns tin mesh vape starter kit,ovns tin mesh vape device,ovns tin mesh vape kit,ovns tin mesh vape box
Ningbo Autrends International Trade Co.,Ltd. , https://www.ecigarettevapepods.com