The article introduced today is "Robust initialization of mo nocular visual-inertial estimation on aerial robots" - a robust initialization method for UAV monocular visual inertia estimation. This article is an article by Mr. Shen Shaozhen from the Hong Kong University of Science and Technology. Classic article, published in ICRA2017.
Due to the nonlinearity of the visual inertial system, whether based on filtering or graph-based optimization methods, the performance of the estimator is heavily dependent on the accuracy of the initial values. Once the initialization is poor, it will not only reduce the convergence speed, but even lead to erroneous estimation. Therefore, a robust initialization algorithm is critical to the safe flight of a six-degree-of-freedom drone.
However, in the actual process, it is difficult for the visual inertia system to obtain an accurate initial state. On the one hand, the scale information of the monocular camera cannot be directly observed; on the other hand, the motion of non-zero acceleration is required to initialize the scale information. However, in time-limited search and rescue missions, this initialization method will fail when the MAV is stationary or moving in a fixed mode. It is necessary to quickly start and initialize the estimator without relying on prior knowledge of drone motion. In addition, it is difficult for visual algorithms to extract rich feature points under fast motion or strong illumination changes. Once the feature point tracking is lost, the estimator will fail. Therefore, it is necessary to study a method that can robustly initialize the estimator in flight.
The authors propose a robust estimator initialization algorithm that provides a high quality initial state for the monocular visual inertial system (VINS) during flight.
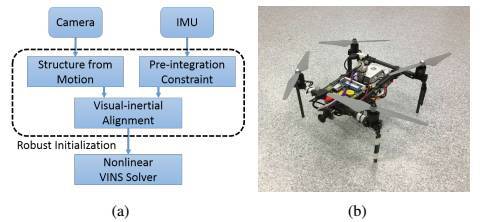
Figure 1. (a) A block diagram of the initialization process of the method in this paper. (b) Four-rotor aircraft for indoor closed-loop experiments with front-facing cameras.
As shown in FIG. 1, the visual part performs a structure recovery motion (SfM), and establishes a structural diagram of the camera pose and the positional relationship of the feature points. The IMU part performs pre-integration constraints and obtains scale information. By aligning the two parts of the results, the gyroscope bias can be corrected, and the metric scale, velocity, and initial value of the gravity vector in the nonlinear tight coupling optimization framework are obtained. The author's method can be successfully initialized in various situations without knowing any prior information about system state and motion.
Finally, the author verifies the effectiveness of the proposed algorithm through the UAV public dataset and physical experiments. It is worth mentioning that I am very grateful to Mr. Shen for opening the source code of many papers for everyone to learn. The algorithm link of this article is: https://github.com/qintony/M-VINS
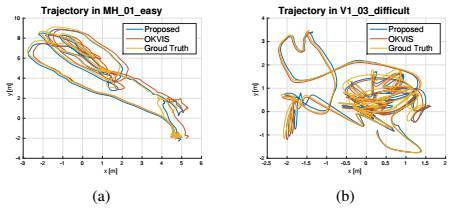
Figure 2. Results of the algorithm's operation on the EuRoC dataset.
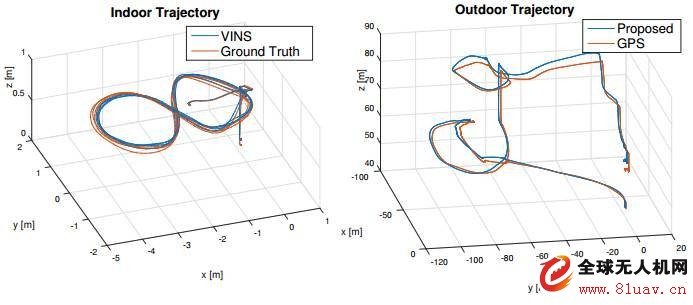
Figure 3. Experimental results of the algorithm in indoor/outdoor experiments. Groundtruth uses the results of OptiTrack and GPS respectively.
We provide quick-turn injection molding by many types of materials, like ABS, PA66, PBT, TPU, TPE, PVC, PE, NYLON 6, PC, silicone, TPE, EPDM, PUR, etc. Special for some plastic parts. Our advantages in internal prototyping, bridge tooling and short-run manufacturing, which can eliminate the costly and time-consuming for customers a lot.
ETOP experienced to support one-stop cable assembly solution service, including wire harness, palstic enclosure, silicone, metal, PCBA, etc.
Injection Molding Parts,Plastic Injection Molding,Low Cost Plastic Injection Molding,Plastic Mold Injection Molding
ETOP WIREHARNESS LIMITED , https://www.oemwireharness.com